
動作確認
 2016/1/13
2016/1/13
基板が完成したので仮組して動かしてみました。Arduino nanoの電源は006P (9V) 電池を使い、モーター電源にはUSBモバイルバッテリーを使っています。
今までは、直流安定化電源を使って実験していましたが、これでスタンドアローンとなりました。制御部分のケースをどうしようかな?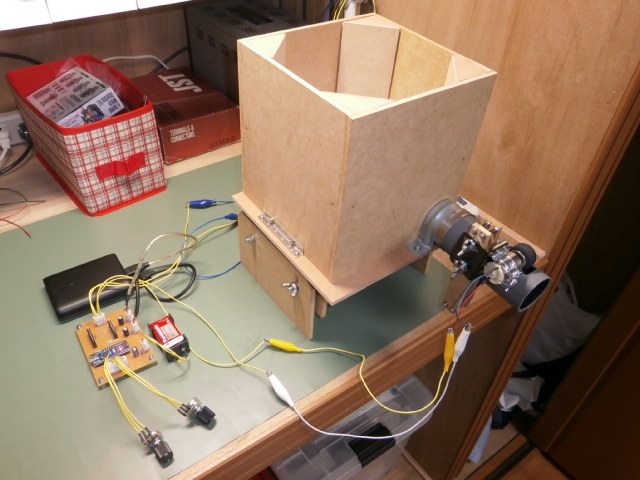
動作していると、もう少し排出間隔を速くしたいので丸板の穴を8個にしてみました。
これで最大排出間隔は約0.7秒となりました。
う~ん、ボールの軌道が安定せず、前後、左右になります。また、発射部の回転を上げるとケース全体が共振?を起こしているようで音が大きくなります。ワンモーターなので、上回転、下回転、横回転と発射部を容易に外して取り付けられるようにしたいので、もう一度、発射部を考えました。
発射部分のモーターは、塩ビパイプにサドルバンドで止めているだけなので、それで振動するのかな?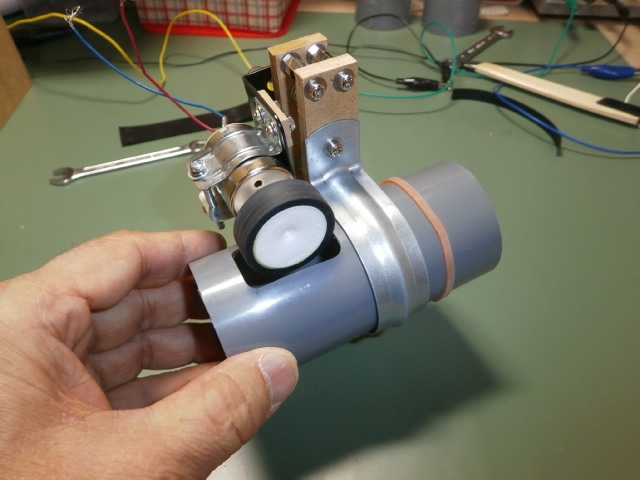
サドルバンドをやめる方向で、新たに塩ビパイプを加工します。
ニッパーで切って、ルーターで綺麗にしていきます。
ゴムバンド、ねじが通る穴を空けます。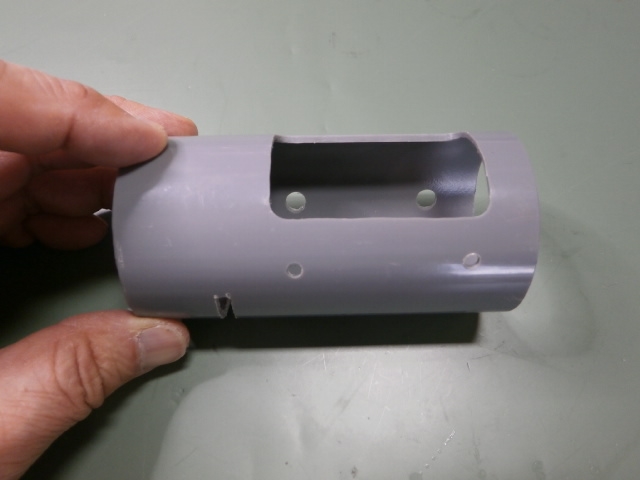
モーターを取り付けます。
後ろから見たところ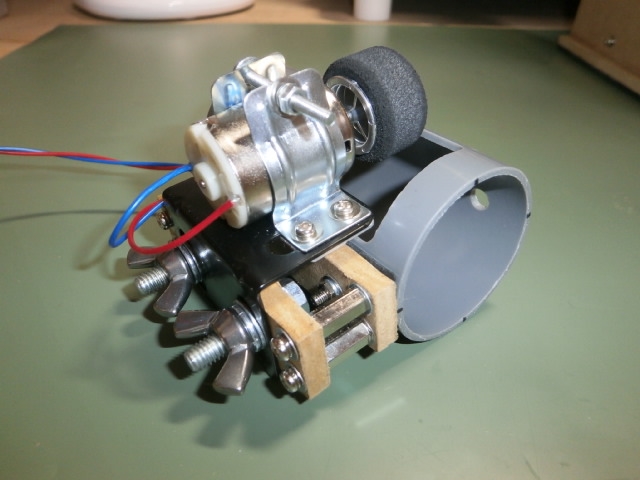
正面から見たところ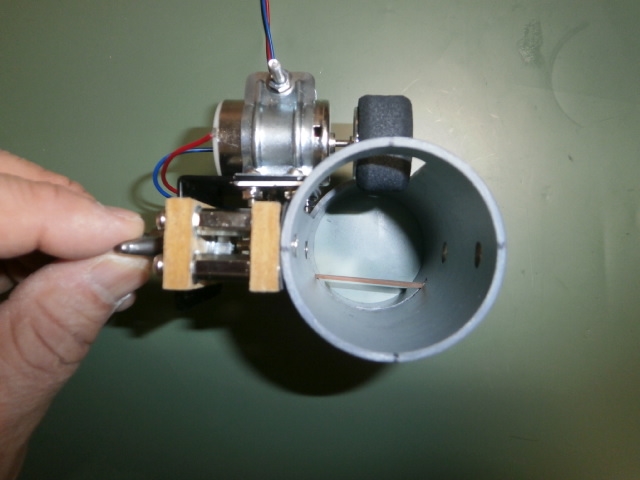
モーターと塩ビパイプを直接、固定したので良くなりましたが、微妙に安定しません。この部分は本当に難しいですね。これで一旦、良しとします。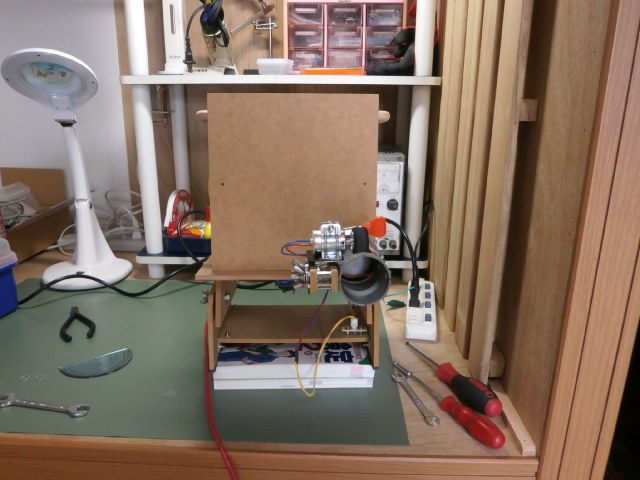
7. 制御部の製作 ←前ページ
次ページ→ 9. 1号機完成!