
二足歩行ロボットセミナーに参加しました。
 2015/8/29
2015/8/29
以前から、ロボットのリンク機構に興味があり、二足歩行ロボットセミナーに参加しました。
上半身部分は、秋月電子で購入した、GWSサーボモーターS03Nを3個使用し、胴体部分、両腕に使用しています。下半身部分は、タミヤ製4速ウォームギヤボックスHEを使い、3Dプリンターで製作されたパーツを組み立てます。いちから設計するわけではなく、講師の方が設計され、部品は3Dプリンターで製作したものが置いてあり図面を見て組み立てます。アルミ板も切ったものが置いてあり一部、折り曲げたりしましたがモーター以外、全て手作りです。
ロボット全体です。肩の方はサーボモーター、腰の部分にウォームギヤボックスとなっています。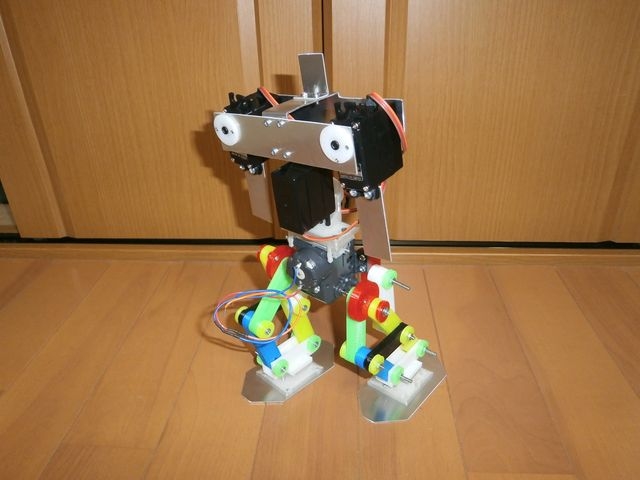
ロボット下半身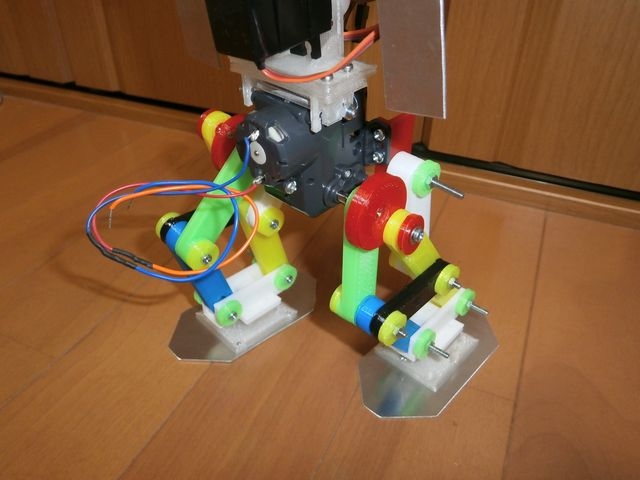
タミヤ製4速ウォームギヤボックスHE
制御は初めて触った、Arduino互換機の「ちびでぃ~のPro」を使用しました。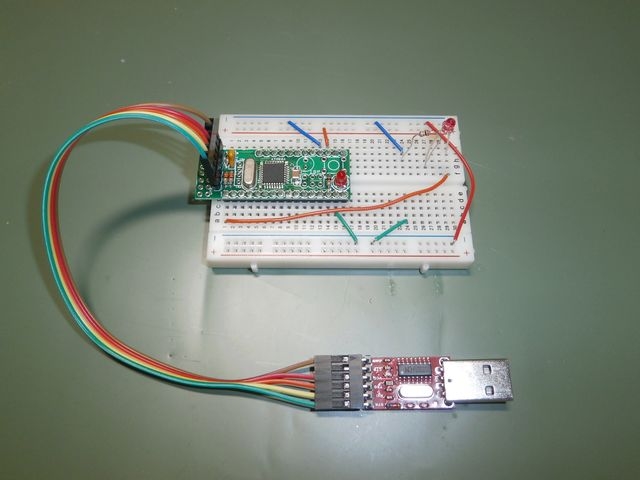
実はこのロボット、下半身だけだと動くのですが、上半身を取り付けるとバランスが悪くこけてしまいます。また、Arduinoマイコンを取り付けてDCモーター、サーボモーターを回すまでは部品と時間の関係で出来ませんでした。足の部分の動作を見ているだけでもリンク機構の勉強になります。
このセミナーでは、Arduino IDEのアドインである、ArduBlockの使い方から始め、Lチカ、DCモーター正転逆転、サーボモーターの使い方を学びました。
セミナーを受講しているときは、Arduinoマイコンであるということはわかったのですが、それ以外は何も理解できませんでした。帰宅してからテキストを眺めて同じ環境を整えようとしましたが、Arduinoのバージョンが違ったり、互換機があるということを知り、ネット検索などで時間がかかりました。
Arduinoの名前は知っていましたが、触る機会がなく、主にトランジスタ技術2012年10月号の「チョコッとお試し!ARM32ビット・マイコン」にはまってしまい、LPC1114FN28を触っていました。このマイコンは40ピンのDIPタイプで、ブレッドボードに簡単に差し込め、また、LPCXpressoの開発ツールはユーザー登録すれば、128KBまでのコードを生成してくれるので、だいたいのことは出来そうです。その後、流れは、mbedとなりUSBメモリのように使えることに感動しました。
PICマイコンも出始めの頃は使っていましたが、今は色々なマイコンがあり何を使おうかと悩みますね。マイコンもパーツとなってしまい、パーツを買ってソフトを入れるというスタイルとなって、ハード部分が少なくなりちょっと寂しいですね。
3D CAD、3Dプリンター、レーザーカッター、マイコン、電子部品があれば、その場でものが出来上がってしまいますね。私は、部品は規格品を買うという発想になっていますが、これからの時代は確実に部品を作るという時代になり、アイディア次第ですね。色々と刺激になり毎日が勉強です。